Position buffering


After receiving a location, Traccar waits X seconds (2.5s by default) before processing it. If it receives older positions, it extends buffering. That way if your device is uploading buffered historical data in the wrong order, Traccar will buffer and reorder it to be in the correct sequence. The result is more accurate distance, motion, trips and stops.
at the moment there is <entry key='filter.relative'>true</entry>
how this "Position buffering" mission is different than 'filter.relative'?
Very little overlap. Buffering doesn't filter anything.

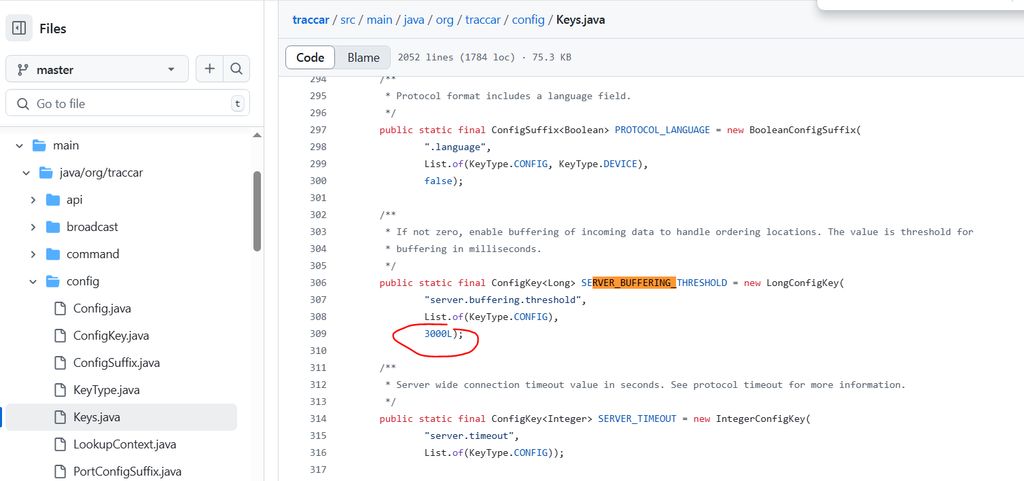
Actually, the default is 3 seconds, not 2.5:
public static final ConfigKey<Long> SERVER_BUFFERING_THRESHOLD = new LongConfigKey(
"server.buffering.threshold",
List.of(KeyType.CONFIG),
3000L);
If I want to disable buffering entirely, is it ok to set the config to 0L?
The default is 2.5 seconds in the latest official release. If you want to disable, yes, set to zero.
Thanks for confirmation!
On a side note, on github as of today i see this:
I'd like to know about Position buffering which is added in V6.8.0. what is it and what it's use case?